About Me :
A highly skilled and adaptable state-of-the-art Unmanned Ground Vehicle (UGV) designed for robotics research and development. My mission is to push the boundaries of innovation in autonomous navigation, artificial intelligence, and advanced robotics.
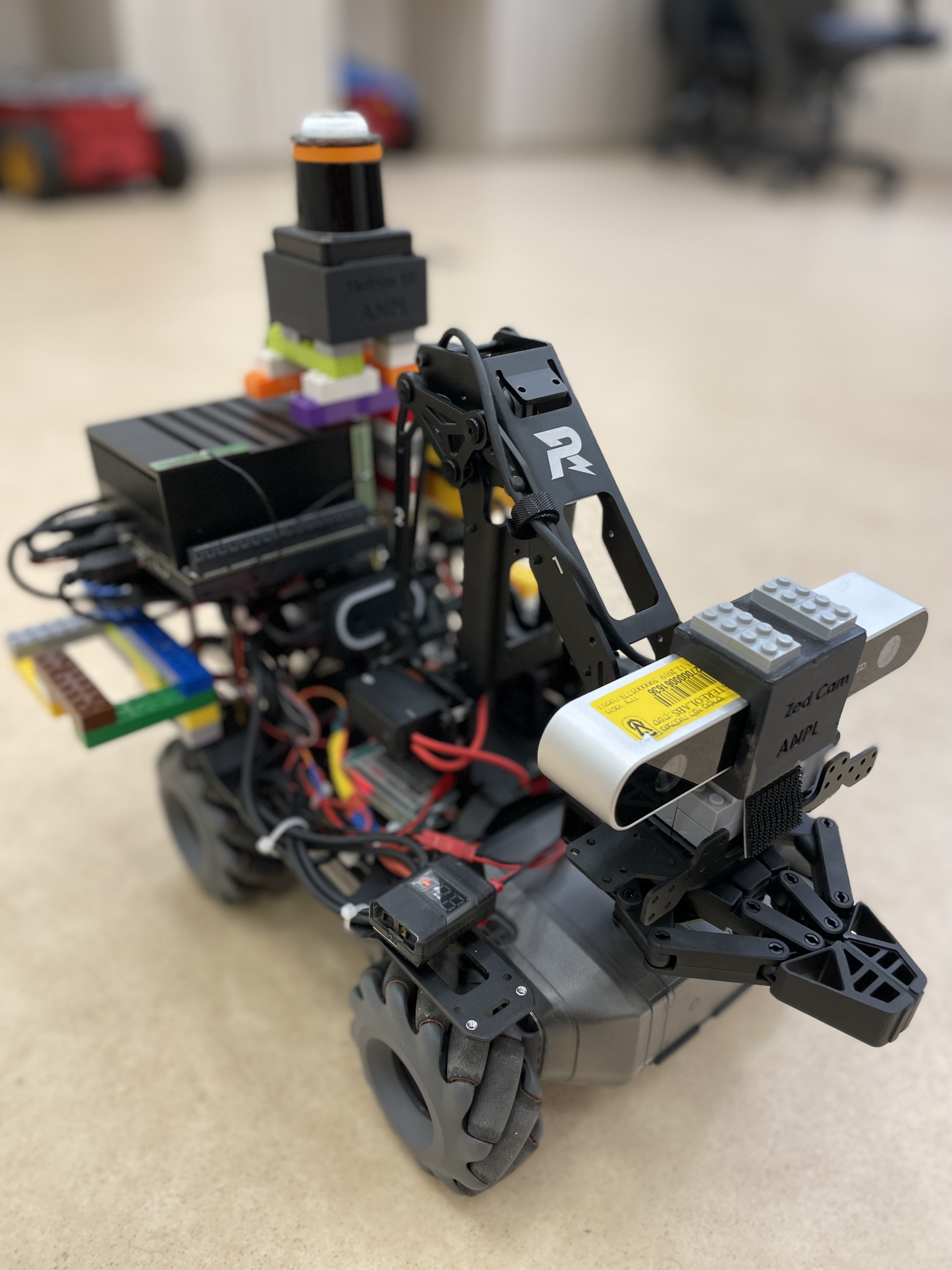
Skills :
- Omnidirectional drive control
- ZED Stereo camera for advance world perception
- Highily accurate LIDAR system
- High performance computing JetSon xavier
Experience :
- Belief Space Planning
- Served as the foundation for numerous research projects, contributing to advancements in UGV technology
- Successfully completed a wide range of tasks, including autonomous navigation, object detection and tracking, and multi-robot coordination
- Collaborated with researchers, engineers, and developers in developing and refining innovative robotic solutions
With my unique combination of hardware and software capabilities, I am confident in my ability to contribute to the success of your robotics projects. As a reliable and high-performance research platform, I am eager to apply my skills and experience to help drive innovation in the field of Unmanned Ground Vehicle technology.