Welcome!
The Autonomous Navigation and Perception Lab performs research related to single and multi-robot autonomous perception, navigation and planning under uncertainty in the context of mobile robotics. Research in the lab is highly multidisciplinary, involving both fundamental theoretical studies and experimental verification. Please visit Research and Publications pages to see ongoing research activities. The lab was founded by Assoc. Prof. Vadim Indelman in 2014.
We are always looking for highly-motivated individuals to join our group, see details here.



Recent News & Updates
@ANPL_Technion
Jul 07
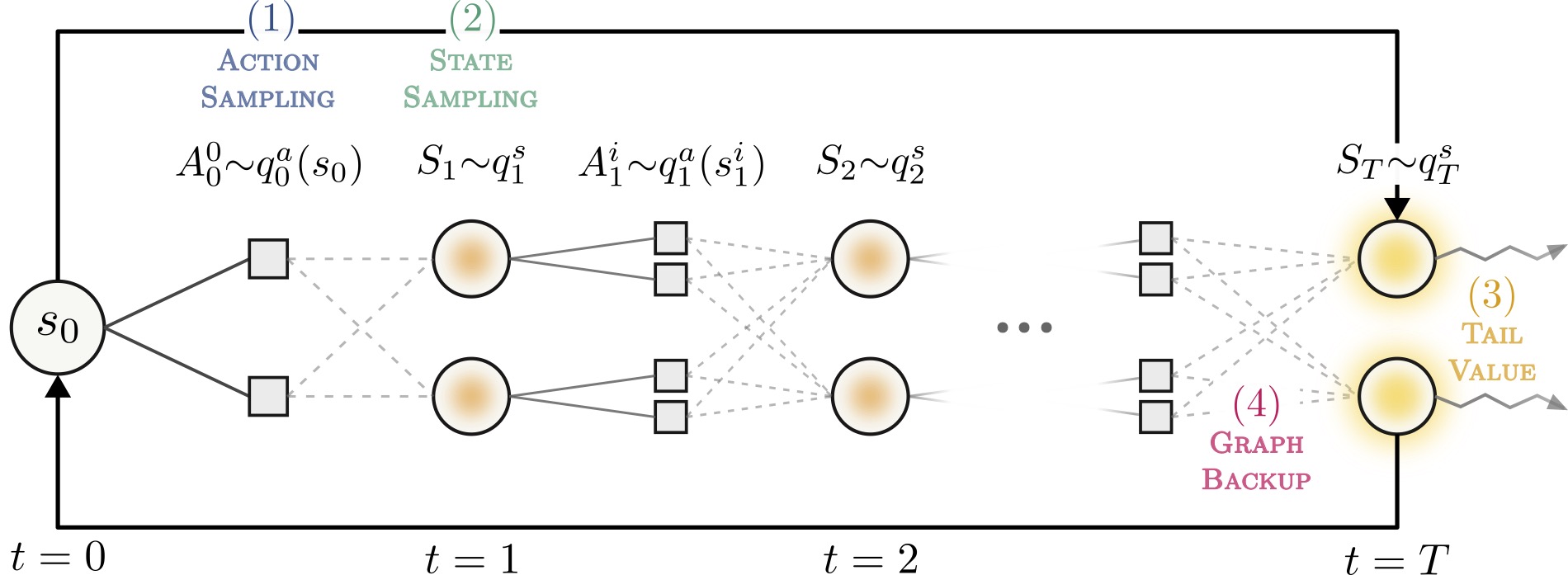
A preprint entitled "Graph Sparse Sampling: Breaking the Curse of the Horizon in Continuous MDP Planning" has been published on arXiv.
arxiv.org/abs/2607.05359
May 11
A preprint entitled "Finite-Time Analysis of MCTS in Continuous POMDP Planning" has been published on arXiv.
arxiv.org/abs/2605.07703
May 01
The paper "Action-Gradient Monte Carlo Tree Search for Non-Parametric Continuous (PO)MDPs" has been accepted for publication at IJCAI-ECAI 2026.
arxiv.org/abs/2503.12181
Apr 03
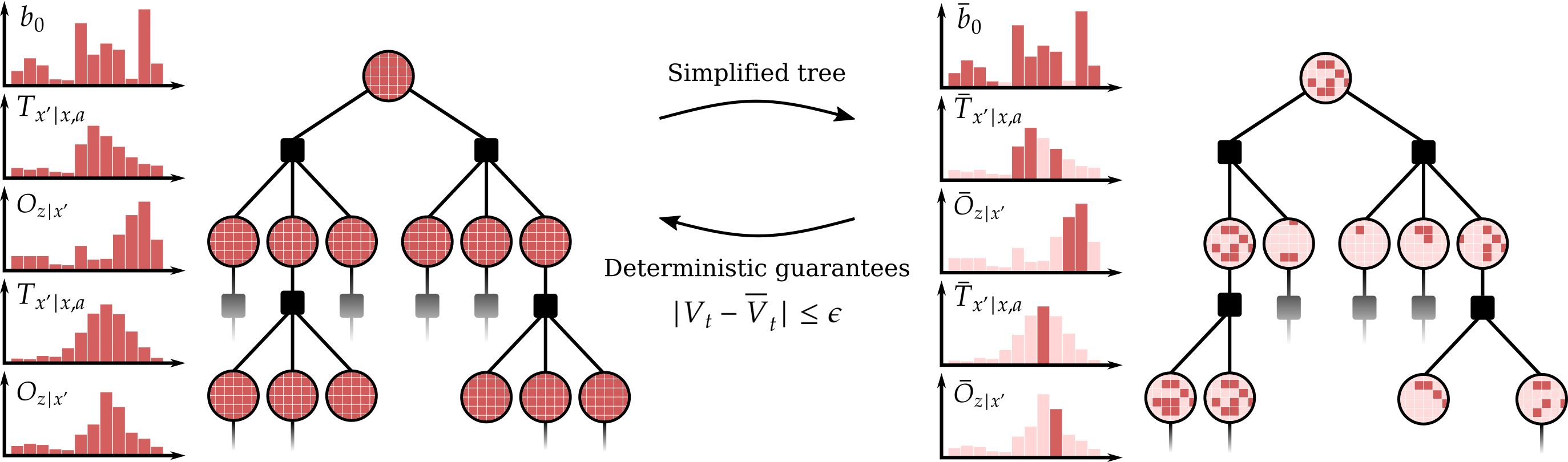
The paper "Open-loop POMDP Simplification and Safe Skipping of Replanning with Formal Performance Guarantees" has been accepted for publication at WAFR 2026.
arxiv.org/abs/2604.01352
@vadim_indelman
Jun 12
We will present the paper "Open-loop POMDP Simplification and Safe Skipping of Replanning with Formal Performance Guarantees” at WAFR 2026 next week.
lnkd.in/dP7PwTtj
May 24
We will present two recent RA-L and T-RO papers at next week:
lnkd.in/dQPieTTa
lnkd.in/d7ya3NHB
Mar 29
An MSc seminar by Tamir Shazman on "Online Robust Planning under Model Uncertainty".
www.youtube.com/watch?v=Zgy…
Jan 29
Pleased to share the recording of my Colloquium talk at the Technion from December 2025:
www.youtube.com/watch?v=A5-…
We gratefully acknowledge our funding sources over the years: