Each one of us needs to solve a localization problem many times each day: whether if it about getting to our office, to a shop, or even to our room at home, the first step is to know where we are. Usually, we localize ourselves using our memory of the same place from a previous time we visited there, but we can use also use other sources of information such as maps. In this project we will develop a computer vision algorithm to solve the localization problem using a 3D aerial model. The goal is to estimate, given a sequence of ground images, where the cameras have been located. We split the principal problem to several steps, beginning with an easier case when good pose priors exist, and gradually decrease the quality of this prior. We will also use the movement of the camera in order to better understand the scene that we see.
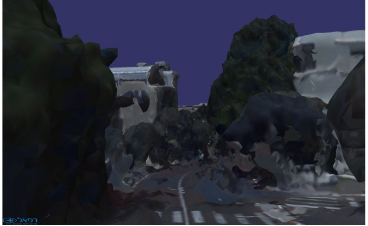
The main challenge is the fact that the model was reconstructed from aerial images, while we live on the ground. Therefore, when rendered to a ground level viewpoint, the model is severely distorted and the images look different, although representing the same viewpoint and the same scene. An example is given below. This is the main difference between this project and previous work in the subject of visual localization.

Prerequisites:
- Strong programming skills (preferably Python or C++). Background in (deep) reinforcement learning, computer vision, robotics is an advantage.
Project expected outcome:
- Working algorithmic prototype and publication in a leading robotics or computer vision conference/journal
Academic supervisor:
- Prof. Vadim Indelman (email)
Duration: 1 or 2 semesters