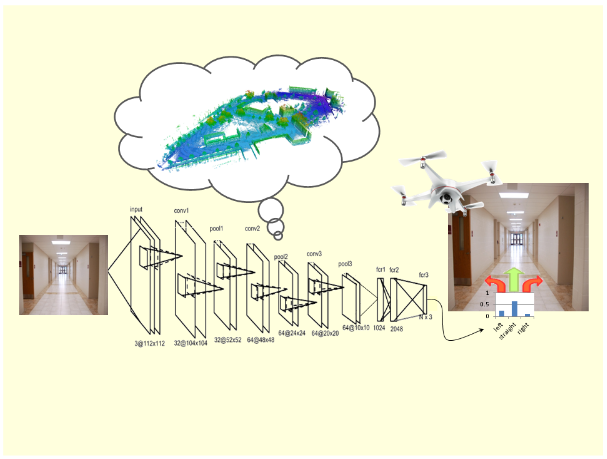
In this project we shall investigate approaches to address autonomous navigation and perception in unknown environments via deep learning. Specific project objectives will be determined together with the student(s).
Prerequisites:
- Strong programming skills (preferably Python or C++). Background in (deep) reinforcement learning, computer vision, robotics is an advantage.
Academic supervisor:
- Prof. Vadim Indelman (email)
Duration: 1 or 2 semesters