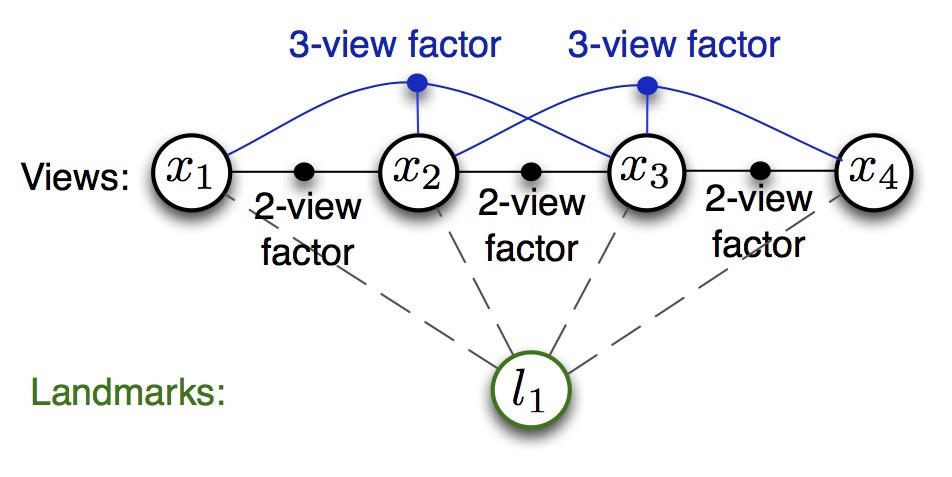
In this research we introduce incremental light bundle adjustment (iLBA): an efficient optimization framework that substantially reduces computational complexity compared to incremental bundle adjustment. First, the number of variables in the optimization is reduced by algebraic elimination of observed 3D points, leading to a /structureless/ BA. The resulting cost function is formulated in terms of /three-view/ constraints instead of re-projection errors and only the camera poses are optimized. Second, the optimization problem is represented using graphical models and incremental inference is applied, updating the solution using adaptive partial calculations each time a new camera is incorporated into the optimization. Typically, only a small fraction of the camera poses are recalculated in each optimization step. The 3D points, although not explicitly optimized, can be reconstructed based on the optimized camera poses at any time.
Related Publications:
Journal Articles
- M. Chojnacki and V. Indelman, “Vision-based Dynamic Target Trajectory and Ego-motion Estimation Using Incremental Light Bundle Adjustment,” International Journal of Micro Air Vehicles, Special Issue on Estimation and Control for MAV Navigation in GPS-denied Cluttered Environments, no. 2, 2018.
- V. Ovechkin and V. Indelman, “BAFS: Bundle Adjustment with Feature Scale Constraints for Enhanced Estimation Accuracy,” IEEE Robotics and Automation Letters (RA-L), no. 2, 2018.
- V. Indelman, R. Roberts, and F. Dellaert, “Incremental Light Bundle Adjustment for Structure From Motion and Robotics,” Robotics and Autonomous Systems, 2015.




Theses
- V. Ovechkin, “Bundle Adjustment with Feature Scale Constraints for Enhanced Estimation Accuracy,” Master's thesis, Technion - Israel Institute of Technology, 2018.
- M. Chojnacki, “Vision-based Target Tracking and Ego-Motion Estimation using Incremental Light Bundle Adjustment,” Master's thesis, Technion - Israel Institute of Technology, 2017.

Book Chapters
- V. Indelman and F. Dellaert, “Incremental Light Bundle Adjustment: Probabilistic Analysis and Application to Robotic Navigation,” in New Development in Robot Vision, Springer Berlin Heidelberg, 2015, pp. 111–136.
Conference Articles
- V. Indelman, A. Melim, and F. Dellaert, “Incremental Light Bundle Adjustment for Robotics Navigation,” in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Nov. 2013.
- V. Indelman, R. Roberts, and F. Dellaert, “Probabilistic Analysis of Incremental Light Bundle Adjustment,” in IEEE Workshop on Robot Vision (WoRV), *best poster award*, Jan. 2013.
- V. Indelman, R. Roberts, C. Beall, and F. Dellaert, “Incremental Light Bundle Adjustment,” in British Machine Vision Conference (BMVC), Sep. 2012.
- V. Indelman, “Bundle Adjustment Without Iterative Structure Estimation and its Application to Navigation,” in IEEE/ION Position Location and Navigation System (PLANS) Conference, Apr. 2012.
