- Vision Based Navigation and Mapping (086761)
- Autonomous Decision-Making/Planning under Uncertainty (086762/0970252)
We encourage student participation from multiple faculties at the Technion.
Vision Based Navigation and Mapping (086761)
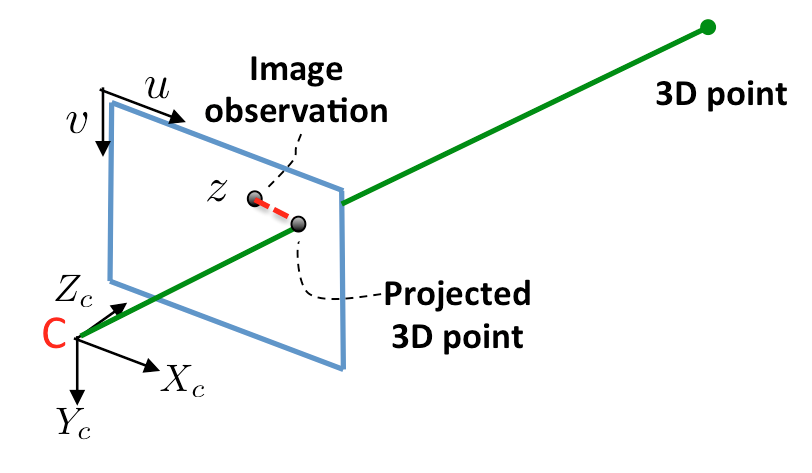
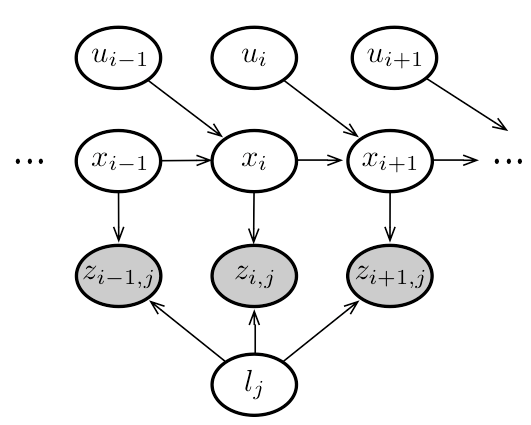
The course focuses on fundamental topics in vision aided navigation (VAN) and simultaneous localization and mapping (SLAM), which are essential for autonomous operation in unknown, uncertain or dynamically changing environments.
Topics to be covered include: Bayesian inference, state of the art SLAM and VAN approaches, and bundle adjustment. Depending on progress, some of the following advanced topics will be also briefly covered: multi-robot cooperative localization and mapping, active SLAM and belief space planning, intro/overview of recent deep learning approaches.
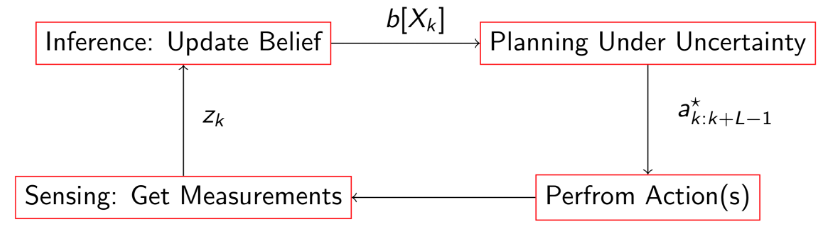
Autonomous Decision-Making/Planning under Uncertainty (086762/0970252)
The course provides mathematical tools and approaches for solving planning under uncertainty problems in partially observable domains in the context of AI and robotics. The course has two variants (086762/0970252); each variant is typically offered every other year.
Topics to be covered include: Probability space, Probabilistic inference, MDP and POMDP problem formulations, belief space planning, information-theoretic costs, nonparametric inference, offline MDP and POMDP approaches (dynamic programming, value iteration, policy iteration, Alpha vectors), online MDP (forward search, branch & bound, sparse sampling, Monte Carlo tree search), online POMDP approaches (POMCP, POMCPOW, PFT-DPW), robust and risk-averse planning under uncertainty.